Ceci est une ancienne révision du document !
Robotique et Systèmes Embarqués
 La robotique, est l'ensemble des études et des techniques de conception et de mise en œuvre des robots effectuant des tâches déterminées en s'adaptant à leur environnement.
La robotique, est l'ensemble des études et des techniques de conception et de mise en œuvre des robots effectuant des tâches déterminées en s'adaptant à leur environnement.
Les systèmes embarqués / l'informatique embarquée peut être défini comme un système électronique et informatique autonome, qui est dédié à une tâche bien précise.
- Voir la page intelligence artificielle
- Voir également la domotique
Voir les architecture de processeur :
Matériel robotique avancé
Muscle artificiel : des actionneurs de nouvelle génération :
- Actionneurs à base de nanotube de carbone( et aerogel ) : Les MWNT peut se contracter 4000 fois plus vite qu'un muscle biologique, peut être interrompu et réactiver plus de 1000 fois par seconde. Fonctionne a des températures de -193 °C à 1627 °C, avec un peu de baisse d'efficacité 2). Voir méthode de fabrication de base libre
Structure 'osseuse' :
- Des composés à base de Nanotube de carbone ( CNT + Acide Polylactic + hydroxyapatite )
- Nanotube de carbone et le graphene est plus résistant que le crystal.
Peau artificielle :
- Peau artificielle avec des cellules souche
- Peau synthétique ( non 'humaine' )
- Peau synthétique à base de polymère : pour les androids actuels, et pour les masques d'effets spéciaux de robot au cinéma
Contrôle robotique à distance
Composant logiciel pour robotique
Operating System / Framework
- Opencog : Opencogbot est déjà utilisé par une université en chine sur des robots nao ( utilise ubuntu ).
- ROS (Robot Operating System) (willow garage google).
D'autres logiciels propriétaires et fermée existent, dans divers sphères de la société, et continuent également d'évoluer. 3)
- Il ne suffit pas de faire une IA forte, il faut faire une IA forte et qui soit Amicale ( concept de Friendly AI )
- La première IA forte aura une forte importance.
- Et la loi de moore est notre ennemi.
-
Système Embarqué
Pour tablette pc et netbook :
- ubuntu et ubuntu arm
Pour téléphone portable
- Meego : Concurrent plus ouvert qu'android de google. Linux Foundation soutient MeeGo :
- Voir aussi téléphonie
Vision
- OpenCV Open Computer Vision : (willow garage ( google ) )
- “What and where: A Bayesian inference theory of attention.” (MIT : nouveau model mathématique pour l'attention visuelle, issus des neurosciences)
Des FPGA (field-programmable gate array) adaptés sont utilisé pour le traitement de la vision en robotique :
- J1 Forth CPU : A la base du FPGA utilisé dans PR2 ( schemas )
LIDAR
La télédétection par laser ou LIDAR, acronyme de l'expression en langue anglaise « Light Detection and Ranging ». Plus précis qu'une simple caméra avec les algorithmes actuels, est utilisé actuellement sur la plupart des projets nécessitant de la précision (voitures automatiques, … )
- Open Lidar Project (site) Le projet c'est attaqué au Neato Robotics XV-11 (aspirateur robot et précis) (video). Neato affirme que le capteur lui-même pourrait être fabriqué pour environ 30 dollar. Maintenant, actuellement, vous devez acheter l'ensemble du robot (pour 399 $), mais c'est encore avantageux pour un balayage lidar de 360 degrés avec une précision de 1 degré et 10 Hz fréquence de rafraîchissement. ( les lidars coutent plus de 1000 dollars pour le moment ).
- Dielmo Open LiDAR (site) est un logiciel libre sous licence GNU/GPL dédié à la gestion des données LiDAR. Il s'agit d'une extension au SIG libre gvSIG. Il permet d'ouvrir, de visualiser et d'analyser les données LiDAR. Il est capable de charger de grands volumes de données LiDAR (plusieurs centaines de Giga Octets) aux formats LAS et BIN, en les couplant avec d'autres types de données géographiques raster et vecteur. Dans un futur proche, il sera capable de générer des produits finaux (DSM, DTM, images d'intensité, etc…)
Simulateurs
Interfaçage réseau
Localisation
- MRPT librairie pour "Simultaneous Localization and Mapping (SLAM), computer vision, and motion planning (obstacle avoidance)."
UAV / Helicopter/ Quadricopter / Drone / Avion
Lego Mindstorm
- leJOS (firmware) (site)
Robocup
Robotique personnel
Automobile
-
- Le concept car chinois 'leaf', écologique et automatisé, intelligent (video) (communiquant pour le trafic, et sans conducteur )
Exemples plus avancés :
- Université de Stanford (département robotique) : Une Audi TTS en autopilot pour la course/rally de Pikes Peak. ( Voir leur projet et course réussit des années précédentes : 2005 Grand Challenge organisé par la DARPA , 2007 Urban Challenge ) ( video )
- Driving From Italy To China ... With No Driver : fait par une équipe d'ingénieur italiens : le véhicule ira d'Italie en chine sans conducteur ( soit 13 000 kilomètre ) (video)
Du travail reste à faire pour garantir un niveau de qualité et de sécurité supérieur ou égale à un conducteur humain en milieu urbain 4). C'est sur de bonnes voies. Pour les autoroutes le système est efficace : et en partie déjà en place.
 Kit pour véhicule :
Kit pour véhicule :
- Libre :
- Équipement matériel HD ( caméra hd haute vitesse , machine informatique calibré ) + logiciel libre disponible dans cette page
- …
- Non libre :
- Ca existe, déjà vu ( recherche …)
- …
Gps et réalité augmentée :
- voir le portail téléphonie (pour le moment )
Robotique Electroménager ...
En plus du matériel d'électroménager déjà disponible et connu de tous, ces robots sont disponibles dès aujourd'hui.
 Robot balaie / aspirateur / laveur / tondeuse ( possibilité de reprogrammer soi même : à mettre à jour) :
Robot balaie / aspirateur / laveur / tondeuse ( possibilité de reprogrammer soi même : à mettre à jour) :
- Roomba : un précurseur (hackingroomba) (embedded linux)
- Eclean (asus) , abordable.
La PRG du MIT : Hacked iRobot Uses XBox Kinect to See The World, Obey Your Commands ( logiciel libre )
robot nettoyeur de piscine :
- Aquaproduct
- …
robot de soin animal
- Distributeur
- Litière
open source - complet
* PR (Site :Willow garage) Robot Assistant Personal 5) de Scott Hassan ( senior Google board member )
- e-puck mobile robot, an open-hardware, education oriented, mobile robot. (site)
Mini robot :
- Open-source Micro-robotic Project, "swarm robot" (site)
Helicopter
- DIY Helicopter (site)
Non libre :
- Avec caméra
- Hawk Eye RC Chopper, Mini-hélicoptère radio-commandé avec caméra embarquée ( prix compétitif ) (video)
- Sans caméra
QuadCopter

Non libre :
- AR.drone de Parrot : avec concept de jeu en réalité augmenté, controlable par un téléphone (video)
Téléprésence
-
- BrinBot : Ubuntu ( video ) ( Sergey Brin, co-founder of Google )
Matériel NON LIBRE + Software linux

- Qbo (thecorpora france) : projet open source, un robot domestique à intelligence artificielle fonctionnant sous Linux et doté en prime de Wi-Fi et de Bluetooth, capteur ultrason à l'avant pour détecter les obstacle.

Autres robots ( hardware non libres )
Projet d'UAV des universités
MIT :
- Département "Robust Robotics Group" (RRG) (site) objectifs : «construire des robots sociaux qui peuvent rapidement apprendre ce que les gens veulent, sans être ennuyeux ou intrusif»,
- Quadcopter controlé par la voix (Natural langage) dans un lieu auparavant mappé utilisant UBUNTU 8 ou 9 10).
Robotique de Service
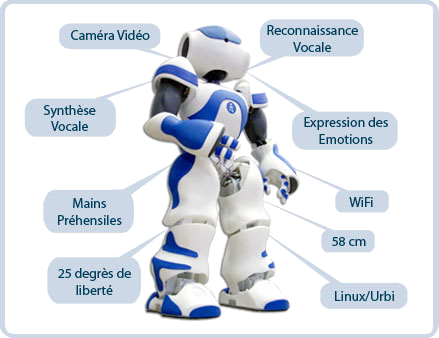
Humanoide / Androide
Le travail de service en général requiert une interface robotique android, voir virtuel : avec reconnaissance vocale.
Utilité :
- Peut servir pour du télétravail, ou de la téléprésence robotisé.
- …
Voir une liste :
- Les actroids, exemple comédien de théatre.
Hotline - Call center
- Voir également la page intelligence artificielle
Hôpitaux
- Robot chirurgien
- Robot infirmier
- Robot
- Robot : TUG 11)
- Robot porteur/souleveur
- Robot sociaux, pour toute personne ayant besoin d'une présence : pour malades, et personnes agées.
. 12)
Voir aussi le portail : santé et médical pour un système de gestion hospitalier évolué.
Robotique pour 'PME'
Voir robot humanoid multitache, impression 3D , machine d'extrusion …
Robotique 'industrielle'
Voir le portail de l'industrie
Robotique pour l'Agriculture
Voir le portail de l'agriculture
Matériel basique
vision
Camera
Voir la page concernant les webcams ( v4l ) et autres supportées par ubuntu linux. (dans le cas d'un robot avec système linux embarqué)
Il existe également des cameras prévu pour la robotique(dans le cas d'un mini-système embarqué : ex: arduino ) :
- CMUCAM (opensource) (site)
Stereo Vision ( 2 camera -> 3D )
- Surveyor's SVS board (compatible ubuntu)
Capteur Laser
Capteur Ultra Son
Moteur
Carte
- Arduino (Libre et opensource)
Ressource
Apprentissage de la robotique et des systèmes embarqués
-
- Recherche "Robot", et Embedded System sur le moteur de recherche de l'OpenCourseWare Consortium
Information
D'autres informations et sites, pour un business plan, ou pour vous.
- Les informations depuis un mois (delicious)
-
- Stefan Schaal Interviewed by Sander Olson on Robotics and the Future of Robots : La robotique connaît une nouvelle vague de financement des gouvernements et de sources commerciales. Ce n'est qu'une question de temps avant que les robots deviennent omniprésents, et les pays ne veulent pas passer à côté de la révolution à venir. Nous assistons donc à des programmes de robotique qui se multiplient dans les Etats-Unis, en Europe et en Asie.
-
Liens externes
- Vallée dérangeante / Uncanny valley : Effet (psychologique humain) d'Acceptation et a l'opposé de dégout du robot selon son apparence.
- Liste wikipedia : Open-source_robotics#Open-source_software